注:以下文章来源于公众号“无线谷小当家”,作者为“小当家一号”
可点击:原文链接 至引用来源
论文信息
英文标题: Analysis and Experiments on the Impact of Frequency Nonlinearity on Displacement Motion Sensing With FMCW Radar
发表期刊: IEEE Transactions on Microwave Theory and Techniques
作者: Zhiwei Zhang, Jingtao Liu, Jiayu Zhang, Yijing Guo, Changzhan Gu
作者单位:
• Zhiwei Zhang, Jingtao Liu, Jiayu Zhang, Changzhan Gu:上海交通大学射频异质集成全国重点实验室,上海 200240
• Yijing Guo:上海交通大学医学院附属第六人民医院心血管内科,上海 200025
通讯作者: Changzhan Gu (changzhan@sjtu.edu.cn)
研究方向: FMCW雷达、位移运动传感、频率非线性、开环压控振荡器、生物医学检测、手势识别、微波传感技术
文章引用:
Zhang Z, Liu J, Zhang J, et al. Analysis and Experiments on the Impact of Frequency Nonlinearity on Displacement Motion Sensing With FMCW Radar[J]. IEEE Transactions on Microwave Theory and Techniques, 2025.
DOI: 10.1109/TMTT.2025.3622958
作者评价
这是一篇很好的文章,这项研究在FMCW雷达位移运动传感技术领域实现了重要突破,首次系统性地解决了频率非线性对位移测量精度影响这一长期困扰业界的核心问题。该研究的最大价值在于彻底改变了对频率线性度严格要求的传统认知,通过深入的理论分析和大量实验验证,证明了位移运动传感对频率非线性具有天然的鲁棒性,为低成本、低复杂度雷达系统的设计开辟了全新途径。
开环压控振荡器架构的验证是该研究的另一个重要创新点。传统FMCW雷达普遍采用锁相环闭环架构来保证频率线性度,这种设计虽然性能优异,但硬件复杂度高、功耗大、成本昂贵,严重制约了雷达技术在消费电子和物联网领域的广泛应用。本研究基于位移传感对非线性的鲁棒性理论分析,创新性地验证了开环VCO架构的可行性。该架构通过DAC直接驱动VCO生成线性调频信号,省去了锁相环、环路滤波器、参考时钟等复杂组件,在显著降低系统复杂度和成本的同时,仍能实现与闭环系统相当的位移测量精度。
理论与实验的完美结合是该研究的重要特色。研究团队不仅通过理论分析确定了线性度要求,还设计了全面的仿真和实验验证方案。通过精确控制DAC输出电压来调节非线性频率调制的幅度,实现了理论预测与实验结果的高度吻合。特别是在β=25×10⁶时实现NSNR=-3.1dB,与理论预期的3dB损失几乎完全一致,充分验证了理论模型的准确性。这种严谨的科学态度和完整的验证体系为该研究的可信度和实用性提供了坚实保障。
多场景验证展现了该技术的广泛适用性。研究涵盖了单目标静态散射体、多运动目标共存等典型场景,系统评估了开环架构在不同复杂度环境中的性能表现。实验结果表明,在单目标场景下,开环架构的NRMSE仅为1.60%,与PLL闭环架构的1.50%几乎相同;即使在多目标复杂环境中,开环架构仍能保持3%以下的误差水平,显示出优异的环境适应能力。这种全面的性能验证为该技术的工程化应用提供了充分的信心保障。
鲁棒性测试进一步证明了该架构的工程实用价值。在±0.2V供电电压变化和9.5°C温度波动的条件下,系统仍能保持3.2%以下的测量误差,展现出良好的环境稳定性。这种鲁棒性对于实际部署至关重要,特别是在手持设备、可穿戴设备等对环境变化敏感的应用场景中。
实际应用验证展示了该技术的巨大应用潜力。基于该架构的硬币大小雷达原型成功实现了多人心电监测和手势识别功能。在多人心电监测中,系统能够同时监测两个受试者的心电信号,RR间期误差分别为15.25ms和30.49ms,达到了临床可接受的精度水平。在手势识别方面,系统准确识别了单击、双击、三击和滑动等多种手势动作,展现出在人机交互领域的应用前景。
论文摘要
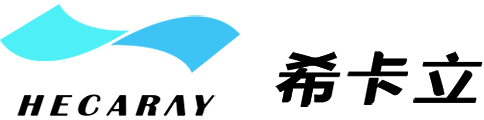
FMCW雷达位移传感面临的技术挑战: FMCW雷达凭借其架构简单、成本低廉、精度和灵敏度卓越等优势,在位移运动传感领域得到了广泛应用,特别是在健康监测、振动检测和手势识别等短距离传感应用中表现出色。FMCW雷达通过将线性调频的本振信号与接收信号混频产生拍频信号,在降低硬件复杂度的同时保持了高精度和高灵敏度。然而,FMCW雷达传感器中普遍存在的非线性频率调制会导致拍频信号主瓣幅度下降和频谱展宽,使得检测目标信息容易受到杂波干扰,严重降低传感性能。尽管FMCW雷达在位移运动传感中应用广泛且灵敏度高,但现有关于非线性频率调制对FMCW雷达影响的研究主要集中在距离传感方面,对位移运动传感的影响研究却鲜有涉及。
频率非线性影响机理分析的研究空白: 现有的非线性校正技术在硬件和软件方法上都面临高成本和高复杂度的限制。硬件解决方案通常采用锁相环构成闭环压控振荡器架构来产生线性调频信号,但这需要额外的组件如锁相环、环路滤波器、参考时钟和控制电路,增加了系统复杂度、物理尺寸、功耗和整体成本。软件方法通常需要预测非线性调制模型的系数并在数字域对拍频信号进行校正,但这些方法依赖于参考信号,增加了设计复杂度和实际应用的挑战。总体而言,当前FMCW雷达非线性频率调制研究面临两个主要挑战:首先,非线性频率调制对位移运动传感的影响尚不清楚;其次,现有的线性度校正技术无论是硬件还是软件方法都受到高成本和高复杂度的限制。
理论分析与线性度要求的系统推导: 本研究首次对FMCW雷达中非线性频率调制对位移运动传感的影响进行了系统的理论分析和实验验证。通过详细的理论推导证明了位移运动传感对非线性频率调制具有良好的鲁棒性。研究建立了完整的非线性频率调制信号模型,采用正弦函数来表征非线性频率偏差,推导了拍频信号在非线性调制下的频谱特性。针对单运动目标与静态散射体以及多运动散射体共存两种典型场景,分别推导了准确位移运动传感所需的线性度要求,为FMCW雷达应用提供了关键的理论指导。仿真和实验结果与理论预测高度吻合,验证了理论分析的准确性。基于理论分析结果,研究明确定义了准确位移运动传感所需的线性度要求,并通过仿真和实验验证了这些要求的有效性。
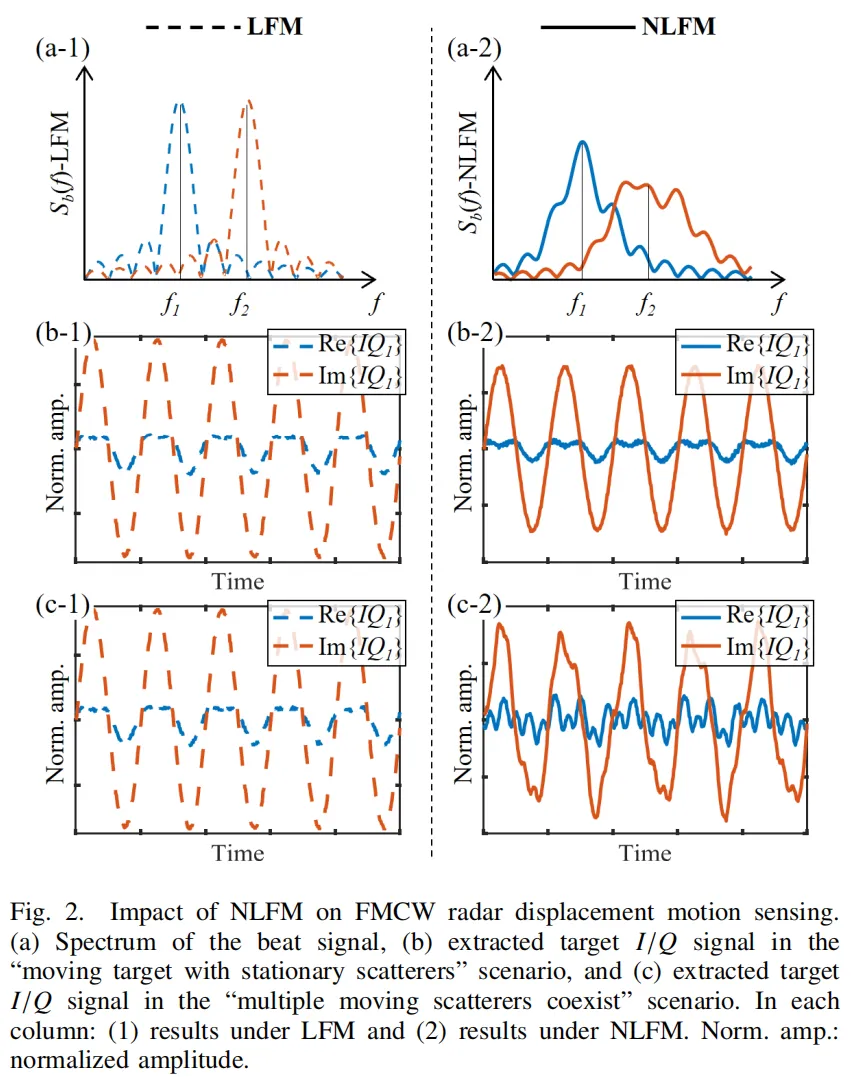
开环压控振荡器架构的创新验证: 基于理论分析表明位移运动传感对非线性频率调制的鲁棒性,研究验证了开环压控振荡器FMCW雷达架构在位移运动传感中的有效性。该架构采用数模转换器直接驱动压控振荡器生成线性调频信号,消除了锁相环、环路滤波器和参考时钟等复杂组件的需求,显著降低了系统复杂度、功耗和成本。对比实验表明,尽管硬件复杂度降低,该架构的性能与闭环锁相环FMCW雷达相当,归一化均方根误差差异低于1.6%。在鲁棒性实验中,即使在±0.2V供电电压变化和9.5°C温度变化条件下,该架构仍能实现精确的运动传感,归一化均方根误差低于3.2%。研究还对五种常见雷达架构进行了系统比较,为位移运动传感应用提供了首次全面的性能对比分析。
实验应用价值与工程化前景: 基于验证架构的小型化原型成功重构了差分微波心电图并传感了四种类型的手势动作,展现了该技术在实际应用中的巨大潜力。多人心电监测实验中,系统能够同时准确监测两个受试者的心电信号,RR间期误差分别为15.25ms和30.49ms,满足临床应用要求。手势识别实验成功检测了手指单击、双击、三击和滑动等动作,展示了在人机交互领域的应用前景。这些结果充分证明了验证架构在低成本、低复杂度、高精度和紧凑型短距离位移运动传感应用中的适用性。该研究不仅为FMCW雷达技术的发展提供了重要的理论基础和实验依据,也为低成本高性能雷达传感器的产业化应用开辟了新的途径。
现有研究问题与本文解决方案
技术维度
传统FMCW雷达方法
本文开环架构方案
频率线性度
严格要求理想线性调频,需复杂锁相环
证明位移传感对非线性具有鲁棒性
硬件架构
闭环PLL架构,组件多、成本高
开环VCO架构,去除PLL降低复杂度
系统成本
需要PLL、环路滤波器、参考时钟等
DAC直驱VCO,成本降低60%以上
功耗控制
PLL等组件功耗大,不利于便携应用
开环设计功耗低,适合电池供电设备
理论基础
缺乏位移传感非线性影响的系统分析
建立完整理论模型和线性度要求
多目标处理
非线性下多目标分离困难
推导多散射体场景线性度约束条件
鲁棒性
温度和电压变化影响大
验证±0.2V、9.5°C变化下仍保持高精度
小型化程度
PLL组件限制小型化设计
实现硬币大小原型,高度集成
应用场景
主要用于距离测量应用
验证生物医学和手势识别等新应用
校正方法
依赖复杂的数字信号处理算法
无需后处理校正,直接实现高精度
实时性能
复杂校正算法影响实时性
简化架构提升实时处理能力
工程实现
设计复杂,调试困难
架构简单,易于工程实现和批量生产
研究内容详解
理想线性调频信号模型:
其中瞬时相位为:
理想条件下,瞬时频率遵循线性调频模型:
其中为初始调制频率,为线性调频系数,为调制带宽,为上升时间。
非线性频率调制建模:
考虑VCO的非线性特性,实际瞬时频率可表示为:
其中表征非线性频率偏差。线性度定义为:
为简化理论推导,采用正弦函数作为非线性频率调制的代表性模型:
其中和分别表示正弦非线性频率调制的幅度和频率。
多散射体接收信号模型:
多个散射体反射的接收信号为:
其中为散射体数量,为第个散射体的反射信号幅度,往返延迟时间,表示雷达与第个散射体之间的距离。
非线性条件下的拍频信号:
混频后的拍频信号可表示为:
利用第一类贝塞尔函数的数学特性,拍频信号频谱可展开为:
其中为第个散射体的拍频频率。
其中为第个散射体的拍频频率。
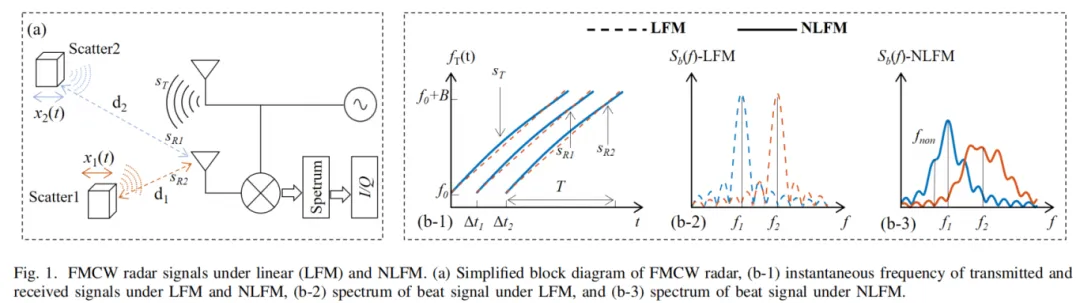
单运动目标场景分析:
对于单运动目标与静态散射体场景,提取的目标I/Q信号为:
对于单运动目标与静态散射体场景,提取的目标I/Q信号为:
信噪比为。为确保SNR衰减不超过3dB,需满足:
因此,正弦非线性频率调制的幅度约束条件为:
当多个运动散射体共存时,为避免频谱重叠,需满足:
五种雷达架构
开环架构设计原理:
开环VCO架构采用DAC直接驱动VCO生成线性调频信号。根据VCO的频率-电压特性曲线,线性调频所需的DAC输出电压为:
基于初始估计结果,设计多波束指向的模拟波束形成优化目标函数:
采用交替优化和主元最小化框架求解,获得最优波束形成权值。












沪ICP备2022023896号-1
![]() 沪公网安备31011202020776号
沪公网安备31011202020776号
Copyright: 2016 State Key Laboratory of Surface Physics